





码垛机的工作原理
平板上工件符合栈板要求的一层工件,平板及工件向前移动直至栈板垂直面。上方挡料杆下降,另三方定位挡杆起动夹紧,此时平板复位。各工件下降到栈板平面,栈板平面与平板底面相距10mm,栈板下降一个工件高度。往复上述直到栈板堆码达到设定要求。
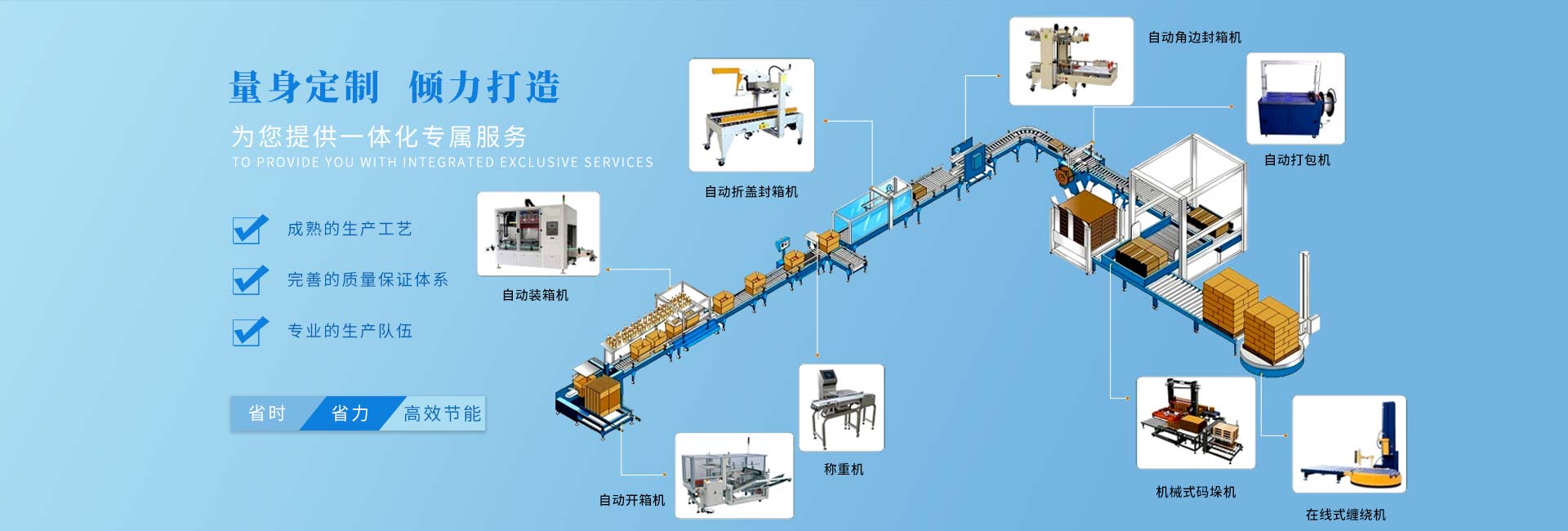
我厂生产自动化设备多年,有丰富的独自研发经验,生产的码垛机功能全,样式多,可根据客户要求提供包装系统解决方案。欢迎新老客户来电咨询。






在采用码垛机器人的时候,还要考虑一个重要的事情,就是机器人怎样抓住一个产品。 真空抓手是常见的机械臂臂端工具(EOAT)。相对来说,它们价格便宜,易于操作,而且能够有效装载大部分负载物。但是在一些特定的应用中,真空抓手也会遇到问题,例如表面多孔的基质,内容物为液体的软包装,或者表面不平整的包装等等。其他的EOAT选择包括翻盖式抓手,它能将一个袋子或者其他包装形式的两边夹住;叉子式抓手,它插入包装的底部来将包装提升起来;还有袋子式抓手,这是翻盖式和叉子式抓手的混合体,它的叉子部分能包裹住包装的底部和两边。将基本EOAT类型进行其他的组合也是可以的。一个饮料包装商在对装满瓶子,并且收缩裹包好的瓦楞托盘进行码垛时碰到了困难,真空吸盘会把托盘上的薄膜扯下来。


码垛机运输带的常见处理方法
当输送带跑偏时,带推动立锥辊,使固定在锥辊的座叉偏转一个角度,经拨销带动横销靠向侧托辊端面挡块,侧辊被制动,输送带与其产生滑动摩擦使托辊组架绕垂直轴转动一个角度,
使带移向中心。采用新型的强力调心托辊架组新型强力调心托辊架组结构与传统产品差不多,保留原回转机构、大梁。托辊改成了几段结构,两边立辊改成锥形辊,同时增设固定锥形辊的座叉、
托辊端面的挡块以及锥辊下的横销。
采用新型托辊现有托辊结构都是由管体、垫圈、轴承座、心轴、轴承、内外密封圈等组成。数量多、重量大,轴承座与管体连接可靠性差。
码垛机的技术特点
1.低位进箱,占用空间少,生产能力大。
2.整机PLC控制,全自动运行。
3.适应多种垛型及瓶型,调整方便。
4.多处安全保护,可带触摸屏控制。
5.采用输送链分段传动,输出段可任意加长。
6.电机、气缸传动及控制全部采用进口元件。
7.尽量采用304材料,整机美观大方。
8.特别适应于码热收缩膜包装的产品。



 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


